在完成四个项目后,获得了一定的技术成长,针对山东泰安金源矿业(东平)有限责任公司在露天矿山边坡监测系统的需求,在传感器设计中进行了主导设计,并配合导师完成软件设计和最终的项目验收。
针对该边坡现状,矿区整体呈“7”字型分布,边坡多分布与矿区外缘。矿区范围内岩性以灰岩为主,地表风化层较少。矿区及周边无区域断裂带或规模较大的断裂构造。区内地层呈单斜构造产出,倾向 350°,倾角 2~4°,产状稳定。
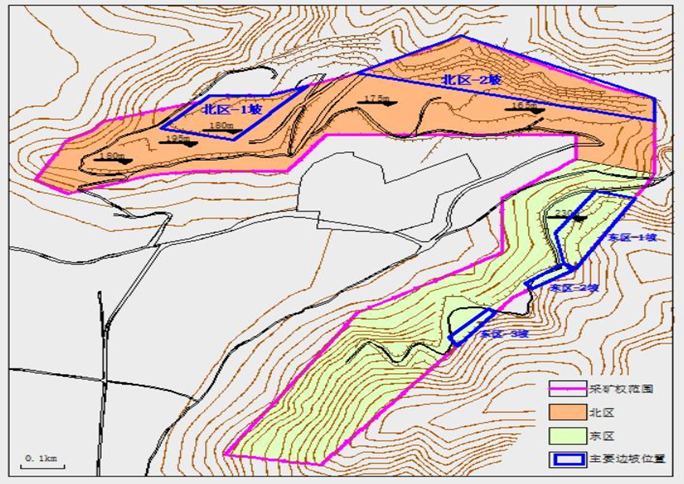





其中由我独立负责东Ⅲ区部分,布设了两个监测点。
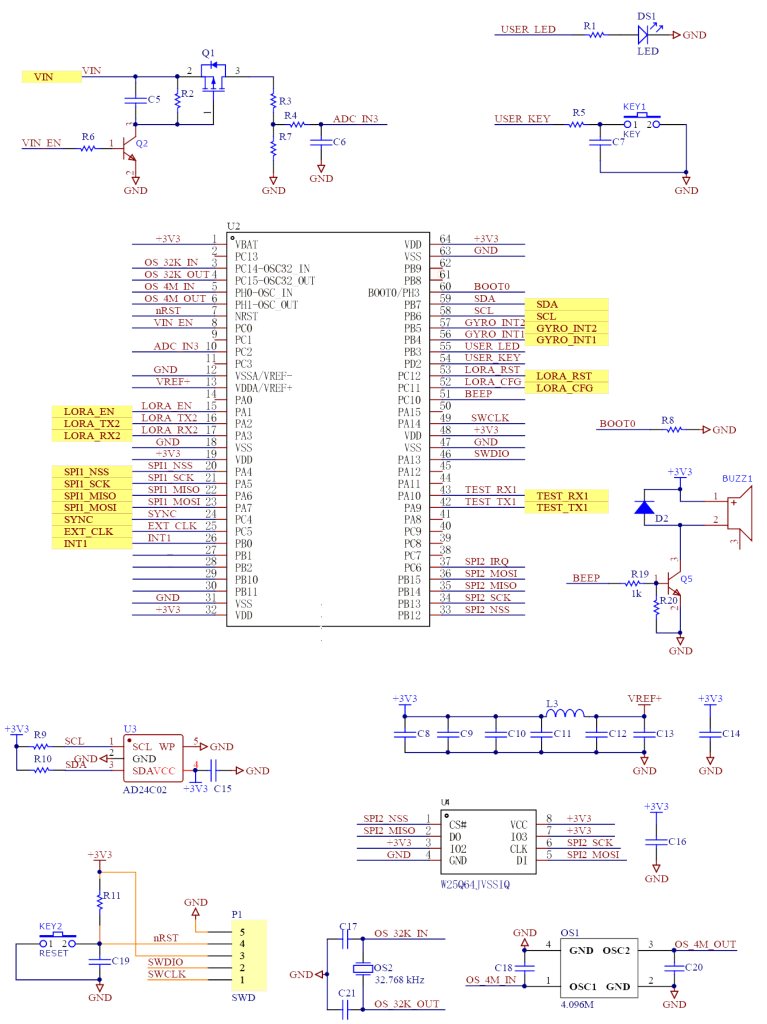
在东Ⅲ区部分,该地传感器部分由我独立设计,考虑到边坡监测系统需在恶劣环境中长期运行,要求主控芯片具备低功耗、高性能计算和远程通信能力。STM32L431RCT6微控制器基于ARM Cortex-M4F核心,集成DSP指令集和浮点单元,具备80MHz处理性能及256KB Flash/64KB SRAM存储,支持I2C/SPI/USB/CAN等通信协议和多通道数据转换接口。
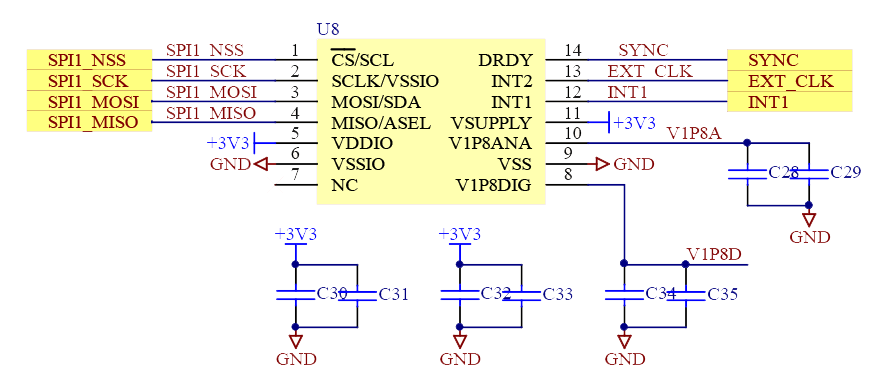
加速度器部分选用了ADXL355,作为行业内低噪声性能的代表,它具有卓越的温度稳定性和内置的低通滤波器,保证了即使在环境条件变化的情况下也能提供精确的加速度数据。通过灵活的SPI和I2C通信接
口易于集成,并且提供了多种可配置选项,足以满足边坡监测的应用需求。
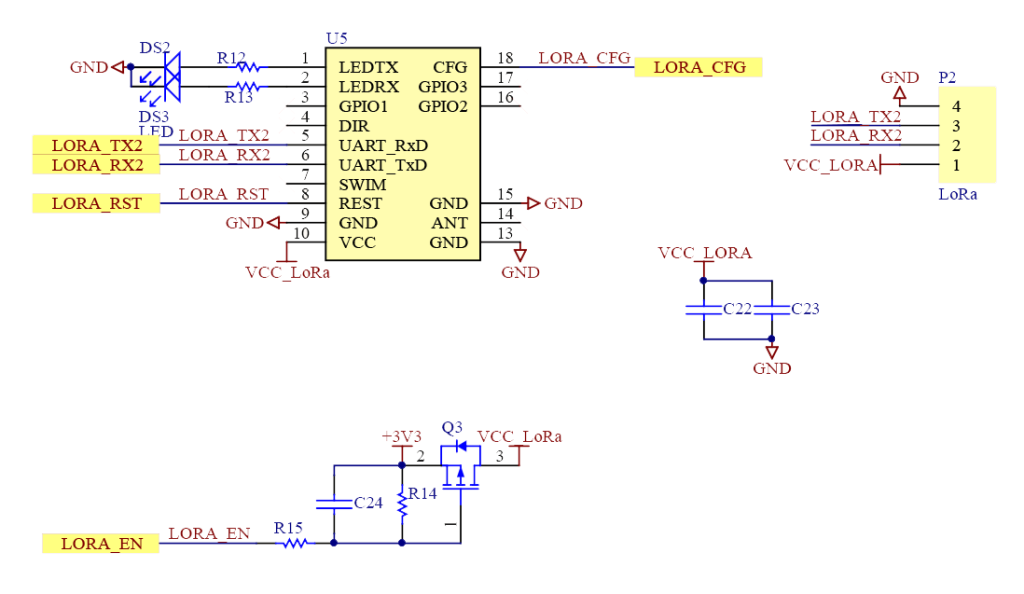
传输方面选择了LoRa传输,一种低功耗广域网(LPWAN)技术,LoRa技术在边坡监测应用中被选用主要因为其长距离通信能力和低功耗特性。它能够覆盖数公里范围内的传感器网络,非常适合于边坡监测这种需要在广阔或偏远地区部署的应用。选用的LoRa 芯片为 255mesh 芯片。
最终设备清单如下所示:
| 序号 | 名称 | 型号规格 | 供应商 | 价格 | 备注 |
| 1 | 主控芯片 | STM32L431RCT6 | 优信电子 | 10.6 | 信号处理 |
| 2 | 加速度传感器 | ADXL355 | ADXL | 320.0 | 用于加速度信号 |
| 3 | 倾角传感器 | mpu6050 | 应美盛 | 6.0 | 用于采集倾角信号 |
| 4 | 通信 | 255MG-L01 | 二五五物联 | 30.0 | 用于Lora传输 |
| 5 | 串行只读存储器 | ad24c02 | 英锐芯电子 | 0.5 | 数据存储 |
| 6 | 串行闪存存储器 | W25Q64 | 力康电子 | 2.1 | 数据闪存 |
| 7 | 电源 | TPS63031 | 优信电子 | 3.3 | 电压调解 |
成本合计372.5,在精度要求不高的民用情况下,可用MPU6050代替ADXL355加速度传感器节约成本,此时成本为52.5。
为了适应不同的应用需求和最大限度地降低能耗,为 STM32L431RCT6 芯片设计了低功耗模式和正常功耗模式。在低功耗模式下,通过外接32.768 kHz的晶体振荡器,该模式优化了电源消耗,使设备能在极低的功耗下持续运行。而在正常功耗模式下,外接4.096 MHz 晶体振荡器,确保了足够的处理能力和快速响应时间,适用于处理复杂计算或需要快速数据处理的情况。
在主控芯片STM32L431RCT6处于低功耗模式时,PA4引脚维持低电平信号,ADXL355设置为低电平启动,高电平关闭。在低电平时,ADXL355传感器启动,不断输出三轴的加速度数据,并发送至W25Q64存储器中存储起来。达到设定的时间后,主控芯片恢复正常模式,W25Q64存储器向主控芯片发送之前存储的ADXL355三轴加速度数据。此时主控芯片开始处理数据,进行筛选数据和温度漂移补偿,完成后向Lora模块发送数据,并通过该模块传输给本地服务器。
当主控芯片处于正常功耗模式时,PA4引脚仍然设置为低电平,ADXL355传感器设置为低电平启动,不断输出三轴的加速度数据,MPU6050设置为低电平启动,MPU6050不断输出三轴的陀螺仪数据。此时主控芯片开始处理数据,进行筛选数据和温度漂移补偿,完成后向Lora模块发送数据,并通过该模块传输给本地服务器。
ADXL355传感器与主控通过SPI进行通信,主控制器在正常工作时,它的PA4引脚输出低电平信号,ADXL355设置为接收到PA4的低电平信号启动,此时,ADXL355传感器直接通过SPI1 MISO向主控制器的PA6发送信号,通过SPI1 MOSI接收主控制器PA7的信号。
当主控制器进入休眠模式时,主控制器的PA4引脚仍然输出低电平信号,W25Q64设置为低电平启动,此时,ADXL355通过SPI2 MISO向存储器W25Q64的D0脚发送数据,存储器进行存储,当主控器定时启动后,存储器W25Q64通过SPI2 MISO向主控制器的PA6脚传输存储到的数数据。该模块的外围电路如图2.8所示。
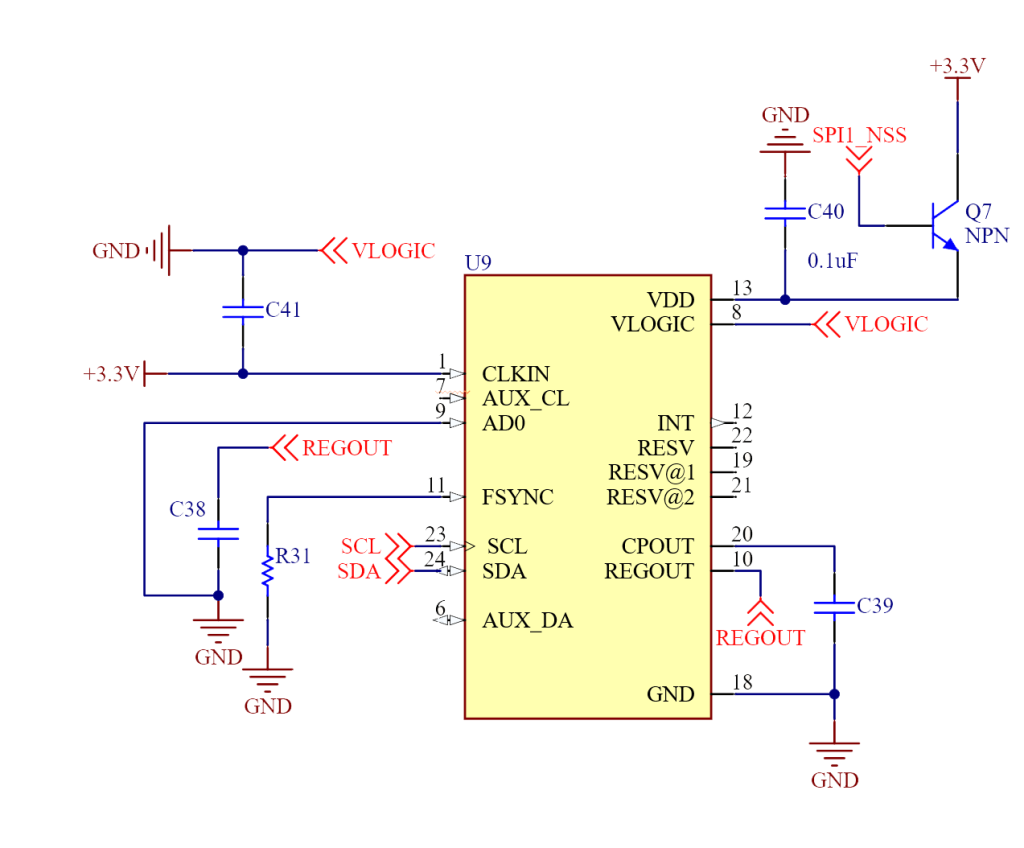
MPU6050传感器与主控制器通过SDA进行通信,主控制器在正常工作时,它的PA4引脚输出低电平信号,MPU6050设置为接收到PA4的低电平信号启动,此时,MPU6050传感器直接通过SDA向主控制器的PB7进行信号接收与发送。MPU6050传感器的外围电路如图2.9所示。
主控芯片通过PA2引脚向LoRa模块传输数据,通过PA3引脚从LoRa模块接收数据。发射方案有两种,一种是定时发送,一种是实时发送。定时发送是当主控芯片处于休眠然后醒来时,在处理完存储器中的数据后,会将去噪和温度漂移优化后的数据进行发送。实时发送则是主控芯片实时处理ADXL355的加速度数据和MPU6050的陀螺仪数据并进行发送,LoRa通信电路如图2.10所示。
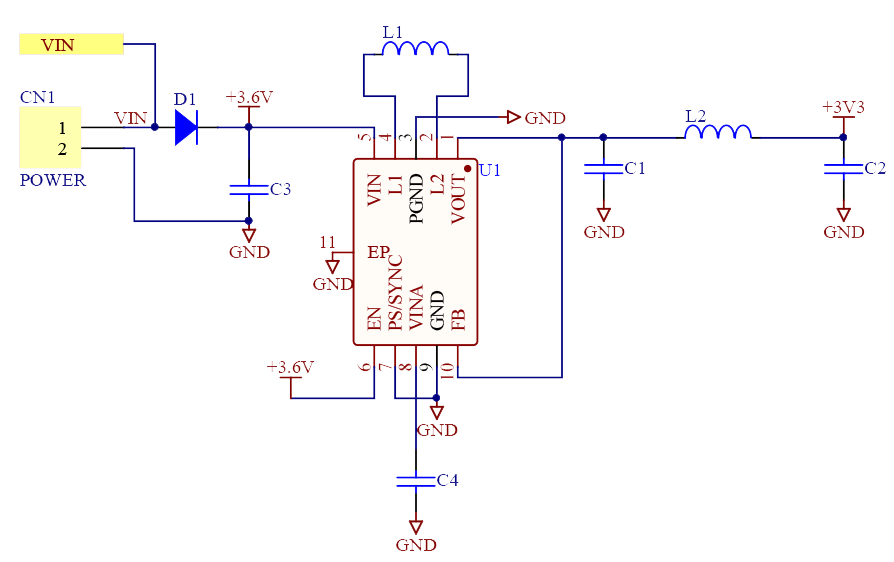
该设计将输入电压转换为稳定的+3.3V直流输出。电路的主要组成部分包括一个用作逆向电压保护的二极管D1,以及若干去耦电容C3和C4,用以减少输入端的电压波动。电感L1和L2通常与电容配合,形成滤波网络。TPS63031芯片负责将输入电压降低并稳定输出,保证设备能够从电源获得恒定的电压供应。电源电路设计图如图2.11所示。
参与传感器设计部分
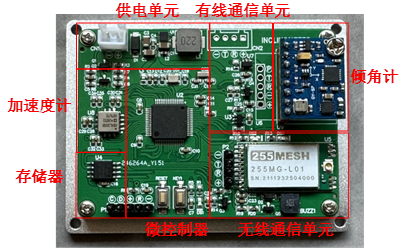
实际制作的传感器电路板如图2.4所示,其尺寸约为72*54*1.6mm,采用模块化设计,方便调试和维护;电路选用工业级芯片,满足现场-20℃~+65℃工作温度范围。最后组装成的传感器如图2.5所示,其外壳尺寸约为 ,采用一体化加工技术,防尘防水等级达到IP67,可在恶劣环境下稳定运行。
评论